fartygets hastighetsindikator
Alternativa beskrivningar. (engelska "lag") gap i tid mellan två fenomen
En indikator som återspeglar eftersläpningen eller framstegen i tid för ett fenomen jämfört med andra
navigationsenhet
En anordning för att bestämma ett fartygs hastighet och den tillryggalagda sträckan
Arabstaternas union (förkortning)
fartygets hastighetsmätare
Hastighetsmätaren på ett sjöfartyg, som inte har något med sjukdomen AIDS att göra
Fartygsinstrument för att bestämma den sträcka ett fartyg tillryggalagt
Balk under golvet
fartygets hastighetsmätare
Instrument för att bestämma ett fartygs hastighet
Hastighetsmätare på en yacht
ombord på fartyget
. "hastighetsmätare" på en skonare
. "hastighetsmätare" på fartyget
Tidsgap
fartygsinstrument
. "hastighetsmätare" på fartyget
Eftersläpning
Skepp "knut"
Marin analog av hastighetsmätaren
fartygsinstrument
Knutmätare
Hastighetsmätare
Det finns en hastighetsmätare i bilen, men hur är det på fartyget?
Mäter farten på ett fartyg
Fartygets "hastighetsmätare"
Fartygets hastighetsmätare
Instrument för att bestämma ett fartygs hastighet
Instrument för att mäta ett fartygs hastighet
Glapp i tid mellan händelserna
. "Hastighetsmätare" på fartyget
. "Hastighetsmätare" på fartyget
. "Hastighetsmätare" på en skonare
. "Hastighetsmätare" på en yacht
Hastighetsmätare i bilen, och vad som finns på fartyget
Tidsgap
Fartygets "hastighetsmätare"
M. morsk. ena sidan, skeppets sida, i förhållande till kanonerna; eld med eftersläpning, från alla kanoner på ena sidan. Angående vattentunnor: lager, rad. En projektil för att mäta farten på ett fartyg: en trätriangel kastas handlöst i vattnet, på ett snöre mätt i knop
Skepp "knut"
. (engelska "lag") gap i tid mellan två fenomen
Fartygets hastighet i processen med höghastighetstester återfinns på olika sätt.
Det är utbrett att bestämma ett fartygs hastighet på speciella mätlinjer utrustade med kustsekant (tvärgående) linjer, avståndet mellan vilka är exakt känt. På den uppmätta linjen bestäms fartygets hastighet av den tid det tar för fartyget att passera ett känt avstånd mellan inriktningarna. Denna metod är ett av de mest exakta sätten att mäta ett fartygs hastighet.
Även kabelmätledningar, som är någon form av de nämnda mätlinorna med tvärsnitt, har en känd tillämpning. På kabelmätlinan passerar fartyget över elkablar som är förlagda i botten av farleden tvärs över fartygets rörelseriktning. Elektrisk ström leds genom kablar, avståndet mellan vilka måste vara exakt känt. Särskild elektronisk utrustning installerad på fartyget registrerar ögonblicket då fartyget passerar över kabeln.
På senare tid har olika radionavigeringssystem, i synnerhet fassystem, börjat användas i stor utsträckning för att mäta ett fartygs hastighet.
Fartygets hastighet kan också mätas med relativt mindre noggrannhet med hjälp av fartygets egen radarstation, som successivt mäter avståndet till ett specifikt objekt som reflekterar radiovågor bra med korta intervaller.
Att mäta ett fartygs hastighet med hjälp av en fläkt av bäring av två objekt eller använda andra navigeringsmetoder, till exempel med hjälp av fyrar, vars avstånd är känt, har inte tillräcklig noggrannhet.
Alla ovanstående och många andra metoder, inklusive huvudmetoden för att bestämma ett fartygs hastighet på en uppmätt linje, har en gemensam nackdel, som är att fartygets hastighet hittas i förhållande till kusten och inte till vattnet . I detta fall överlagras inverkan av vind- eller tidvattenströmmar, som är svår att exakt bedöma, på mätningarna. Under tiden, när man utför hastighetstester och för vidare användning av de erhållna data, är det nödvändigt att känna till fartygets hastighet i förhållande till vattnet som omger det, d.v.s. i frånvaro av en ström. Därför väljs villkoren och provningsplatsen på ett sådant sätt att effekten av strömmen är minst eller riktas, om möjligt, längs mätsektionen. I dessa fall görs kärlets körningar i mätsektionerna i inbördes motsatta riktningar och i en viss sekvens.
Trots vissa svårigheter bör det alltid föredras att bestämma ett fartygs hastighet på en uppmätt linje eller använda radionavigeringshjälpmedel framför att mäta hastighet med standardfartyg och speciella stockar eller hydrometriska skovlar på grund av den låga noggrannheten hos de senare, även om de mäter hastigheten på kärlet direkt i förhållande till vattnet.
För höghastighetstester bör mätlinor användas, placerade nära platsen för konstruktion eller bas för fartyget, vilket kommer att spara tid och bränsle som krävs för att närma sig mätlinjen. På grund av bränsleförbrukningen vid förflyttning till en fjärrmätlinje är det dessutom svårt att ge ett givet värde på fartygets deplacement.
Vattendjupet i området för den uppmätta linjen, d.v.s. dess mätsektion och när det kommer till den (på båda sidor), samt i området för fartyget som svänger till motsatt kurs, bör vara tillräckligt för att utesluta effekten av grunt vatten på vattenmotståndet mot fartygets rörelse och därmed dess hastighet.
Det är känt att systemet av vågor som skapas av fartyget när det rör sig i grunt vatten skiljer sig från vågsystemet på djupt vatten och beror på regimen som kännetecknas av det så kallade Froude-talet på grunt vatten.
Där σ är fartygets hastighet, m/s; g - fritt fallacceleration, m/s2; H - farledsdjup, m.
En förändring i karaktären av vågbildning leder till en ökning eller minskning av motståndet mot fartygets rörelse och påverkar därför dess hastighet.
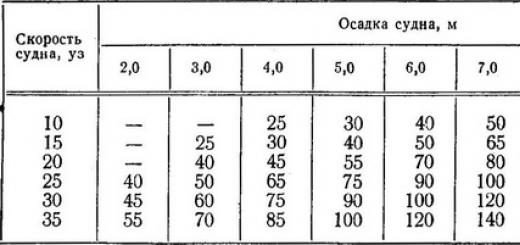
Samtidigt utvecklas ett motflöde av vatten, vilket ökar hastigheten på flödet runt skrovet och följaktligen fartygets friktionsmotstånd. Den fullständiga uteslutningen av påverkan av grunt vatten kräver stora djup av den uppmätta linjen, som inte alltid är möjliga att tillhandahålla (tabell 1).
Tabell 1. Värden för det minsta djupet för den uppmätta linjen, m 
Som ett resultat, när man bestämmer de minsta erforderliga djupen, utgår man vanligtvis från en hastighetsförlust på grund av påverkan av grunt vatten, vilket är 0,1% av det uppmätta värdet. För att uppfylla dessa villkor bör värdet Frh≥0,5 tas för vågmotståndet och för friktionsmotståndet ![]()
Det är på grundval av detta tillvägagångssätt som testreglerna som utvecklats av den 12:e internationella konferensen av experimentpooler rekommenderar att det minsta tillåtna djupet på mätlinjen är större än det som beräknas med formlerna ![]()
där B och T är fartygets bredd respektive djupgående. En liknande metod rekommenderas av den inhemska normalen OH-792-68, men formlerna är skrivna i formen
Mätlinan bör om möjligt placeras i ett område skyddat från rådande vindar och havsvågor. Slutligen är en förutsättning att det finns tillräckligt med utrymme i båda ändar av mätlinan, vilket är nödvändigt för fartygets fria manövrering efter slutet av löpningen på mätsektionen, svängning till motsatt kurs och acceleration efter svängen.
Tillåtna avvikelser av vattendjupet vid inflygningarna till mätlinjens mätsektion bör inte överstiga ± 5 %.
Fartygets körlinje på spårlinjen bör vara minst två till tre mil från kustfaror. Underlåtenhet att uppfylla detta villkor skapar risk för att fartyget i höga hastigheter även vid korrekt manövrering kan gå på grund när rodret fastnar.
Det är inte alltid möjligt att uppfylla alla ovan listade krav, så antalet fullvärdiga mätlinjer är mycket begränsat.
I tabell. 2 visar vissa data som kännetecknar de uppmätta linjerna i ett antal främmande stater. Som framgår av tabellen är längden på mätsektionerna på dessa linjer olika, och djupen på många av dem är otillräckliga för att testa relativt höghastighetsfartyg.
| Mät linjer | Längd på mätsektionen, mil | Fartygets sanna kurs, hagel | Djup på den uppmätta linjen under de starkaste lågvatten, m |
| England | |||
| skelmorley Gao Loh Abs-Head Polperro Portland Flodens mynning Hemligheter Plymouth |
1 1 1 1,15 1,43 1 1 |
0 och 180 156 och 335 111 och 191 86 och 226 134 och 314 161 och 341 93 och 273 |
65-75 30-40 44-52 31-37 31 20 20-28 |
| Danmark | |||
| handla om. Bornholm | 1 | - | 70-80 |
| Frankrike | |||
| Porquerolle Thaya: 1:a avsnittet 2:a 3:a Croix-Trevignon |
3,50 2,36 4,70 5,6 |
48 och 228 48 och 228 48 och 228 120 och 300 |
70-80 70-80 70-80 40 |
| USA | |||
| rockland | 1 | 0 och 180 | - |
På fig. Figur 3 visar ett diagram över en mätlinje nära Rockland (USA), där ett stort antal höghastighetsfartygstester, inklusive forskningstester, genomfördes. Denna linje uppfyller de flesta av de krav som anges ovan, men den är inte skyddad från västliga vindar och de vågor de orsakar. Längden på mätsektionen är lika med en nautisk mil (1852 m), längden på varje accelererande sektion är tre nautiska mil. Mätlinjen är försedd med två kustnära tvärgående (sekant) sektioner vinkelräta mot mätsektionen. En av tvärsnitten är utrustad med tre skyltar (sköldar), den andra - med två.

Ris. 3. Schema för en mätlinje i Rockland (USA). Δ - ledande tecken.
Dessutom placeras milstolpar längs löplinjen för orientering av navigatorn, som indikerar gränserna för accelerations- och mätsektionerna.
Många mätlinor är utrustade med så kallade ledande linjer, på vars linje mätsektionen är placerad. För närvarande anses närvaron av en ledande inriktning inte vara obligatorisk, även om det fortfarande finns en åsikt om att det är nödvändigt i fall där det finns en ström i området för den uppmätta linjen som inte sammanfaller med den uppmätta riktningen. linje. Denna åsikt är dock felaktig: enkla geometriska konstruktioner visar att i detta fall, när fartyget styrs längs den främre riktningen på samma sätt som kompassen, färdas fartyget ett avstånd som är större än avståndet mellan inriktningslinjerna. Det är därför kravet framförs att flödesriktningen sammanfaller med den uppmätta linjens riktning eller i alla fall gör en vinkel med den som inte överstiger 15-20 °.
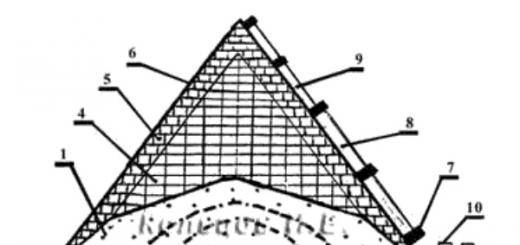
Ledande skyltar (fig. 4) för uppmätta linjer är sköldar som är installerade på sådan höjd att de tydligt kan ses från havet. Vanligtvis installeras den främre skölden, det vill säga skölden som är belägen närmare mätlinjens mätsektion, något lägre än den bakre på ett sådant sätt att sköldarna överlappar varandra i det ögonblick som fartyget passerar inriktningen. upp nästan en hel i vertikal riktning. I mitten av sköldarna appliceras vertikala färgglada ränder, som också bör synas tydligt från havet.

Ris. 4. Inledande märken på mätlinjen.

Ris. 5. Linjär känslighet för anpassningar.
1 - främre inriktningsmärke; 2 - bakre inriktningsmärke.
Ändå kan en observatör på ett fartyg som korsar mätlinjens tvärgående inriktningar i räta vinklar inte praktiskt taget absolut exakt bestämma ögonblicket när inriktningslinjen passerar, dvs. det ögonblick då sköldarnas mittränder ligger på samma vertikala räta linje, som om de utgör en fortsättning på varandra vän.
Storleken på felet vid bestämning av ögonblicket för fullständig täckning av inriktningsskärmarnas mittband beror på den så kallade linjära känsligheten för inriktningen (fig. 5).
Upplösningsförmågan för ett normalt öga är en bågminuter. Låt oss lägga på linjen för fartygets löpning längs den uppmätta linjen (fig. 5) segmentet A1A2, motsvarande en bågminut. I intervallet A1A2 är vinkeln mellan de två tecknen mindre än en minut, och därför kan vilken punkt som helst i detta intervall fungera som en markering för början av hastighetsmätningen. Värdet OA1=OA2 kallas målets linjära känslighet och betecknas vidare med bokstaven W.
För att hitta ett uttryck för W använder vi relationen
tga=tg(p-y). (1.2)
omvandlas till formuläret
Efter att ha ersatt värdena tg β och tg γ i uttryck (1.3) och enkla transformationer har vi
Den första termen på höger sida av uttrycket (1.4) kan försummas, eftersom den kommer att vara av en högre grad av litenhet jämfört med de följande två. Sedan tar ekvation (1.4) formen
dW = tg αDc (Dc + d), (1,5)
var
Ersätt tangensen av vinkeln med en båge och vinkeln med värdet av ögats upplösning, samt ange belysningskoefficienten för målet a "(för dagsljus α"=2 och för nattljus α"=3,5) , får vi värdet på målets linjära känslighet (i meter)
Var
Dc - avstånd från det främre tecknet på sekantinriktningen till underredet på mätlinjen, m; ao - ögats upplösningsvinkel; d - avstånd mellan inledande tecken, m.
Här är känslighetsvärdena för sekantsektionerna på en av de främmande mätlinjerna:
Om vi tar känsligheten för ett par anpassningar lika med hälften av det möjliga absoluta felet, kommer det relativa felet i längden på den uppmätta sektionen av linjen (mål 2-3) att vara 0,4%.
Som framgår av formel (1.6), för att minska felet vid bestämning av avståndet mellan sektionerna och följaktligen öka sektionernas känslighet, är det nödvändigt att förhållandet Dc:d är så litet som möjligt. I praktiken är dock detta förhållande vanligtvis aldrig mindre än tre.
För att utvärdera inverkan av felet i tidpunkten, liksom påverkan av känsligheten hos uppriktningarna och längden på löplinjen på resultaten av hastighetsmätningen, är det nödvändigt att överväga beroendet av fartygets hastighet på vägen och tiden
v=s/t (1,9)
där v är det aritmetiska medelvärdet av flera hastighetsmätningar, m/s; s - aritmetiskt medelvärde för banan, m; t är det aritmetiska medelvärdet av körtiden, s.
Som bekant utgörs felet i resultatet av indirekta mätningar (hastigheten beräknas från den uppmätta vägen och tiden) av felen i resultaten av varje direkt mätning som ingår i den indirekta. Vid indirekta mätningar hittas det relativa felet (rms, sannolikt eller gräns) för varje direkt mätning och det totala relativa felet för den indirekta mätningen beräknas. Ja, i det här fallet
där εν - relativ fel vid hastighetsmätning, .%; εs - relativ vägmätningsfel; εt - relativa fel vid mätning av restid.
Att uttrycka relativa fel i termer av sannolika, får vi
eller, efter substitution, t = s/v.
Där ρs är det troliga vägmätningsfelet, m; ρt - troligt resttidsmätfel, s (enligt ρt = 0,5 s). Troligt vägmätningsfel
om känsligheten för båda anpassningarna antas vara densamma och lika med halva summan av deras känslighet, och antalet körningar i läget är lika med tre.
Genom att ersätta dessa värden i formeln (1.12) och omvandla den får vi
Storleken på felet kommer alltså att bero på tre komponenter: sekantlinjernas känslighet, längden på löpningen längs mätlinjen och fartygets hastighet.
Som ett exempel, i Tabell. 3 visar data om noggrannheten vid mätning av fartygets hastighet på en av mätlinjerna. Baserat på dessa data kan man dra slutsatsen att de uppmätta hastigheterna, oavsett fartygets hastighet, bestäms med en hög grad av noggrannhet. Så, i sektionen av mätlinjen mellan den andra och tredje inriktningen, är felen vid mätning av hastigheten 0,35-0,40%. Med en ökning av längden på mätlinjen (avsnittet mellan den första och andra riktningen är en mil, mellan den andra och tredje riktningen - två mil, och mellan den första och tredje - tre mil), minskar hastighetsmätningsfelet kraftigt .
| Fartygets hastighet, knop | Genomsnittlig känslighet för grindar, m | ||
| 12.8 (sektion mellan den första och andra justeringen) | 14.9 (avsnitt mellan den andra och tredje justeringen) | 13.0 (avsnitt mellan den första och tredje justeringen) | |
| 8 12 16 20 24 28 32 36 30 |
0,58 0,59 0,61 0,63 0,66 0,69 0,72 0,75 0,79 |
0,33 0,34 0,35 0,36 0,37 0,38 0,40 0,42 0,43 |
0,20 0,20 0,21 0,22 0,22 0,23 0,24 0,25 0,26 |
Detta betyder dock inte att det är mer ändamålsenligt att köra på långa uppmätta linjer, eftersom detta ökar felen som orsakas av den möjliga ojämna driften av huvudmekanismerna över en lång sträcka och påverkan av störande yttre påverkan, vilket leder till en kurs avvikelse från en rät linje.
När man tilldelar längden på mätlinjens mätsektion, bör det också beaktas att det under höghastighetstester (i avsaknad av automatisk utrustning för registrering av instrumentavläsningar) ibland är nödvändigt att mäta vridmomentet på propellern axel minst åtta till tio gånger eller för att ta bort indikatordiagram en eller två gånger, såväl som flera gånger för att mäta rotationsfrekvensen för propelleraxlarna och bestämma några parametrar för driften av kraftverket. Allt detta tar minst fyra minuter. Således kan den minsta körlängden s på den uppmätta linjen, som är en funktion av den tid som krävs för att utföra de angivna mätningarna och bestämma fartygets hastighet, beräknas med formeln
s = 0,067νs (1,15)
där νs är fartygets hastighet, knop, s är fartygets körsträcka, miles.
En dimensionsfaktor på 0,067 motsvarar ungefär 4 minuter, det vill säga den tid som krävs för att utföra mätningar.
Den ständiga kunskapen hos navigatören om den tillförlitliga hastigheten på sitt fartyg är en av de viktigaste förutsättningarna för olycksfri navigering.
Fartygets rörelse i förhållande till botten med en hastighet som kallas abenslig, betraktas vid navigering som ett resultat av tillägget av fartygets hastighetsvektor i förhållande till vattnet och den strömvektor som verkar i navigeringsområdet.
I sin tur fartygets hastighetsvektor i förhållande till vattnet (hänvisakropphastighet)är resultatet av arbetet med fartygsframdrivning och verkan av vind och vågor på fartyget.
I frånvaro av vind och vågor bestäms det enklast av propellrarnas rotationsfrekvens.
Att känna till hastigheten gör det möjligt att bestämma avståndet som fartyget S tillryggalagt ungefär i miles:
S handla om = V handla om t, (38)
där V omkring - fartygets hastighet, bestäms av rotationsfrekvensen för propellrarna, knop; t- fartygets seglingstid, h.
Denna metod är dock felaktig, eftersom den inte tar hänsyn till förändringen i fartygets tillstånd (nedsmutsning av skrovet, förändring i djupgående), inverkan av vind och vågor. Följande faktorer påverkar fartygets hastighet genom vattnet.
1. Graden av lastning, rullning och trimning av fartyget. Fartygets hastighet ändras med djupgående. Vanligtvis, vid bra väderförhållanden, har ett fartyg i barlast något högre fart än ett fullastat. Men med ökningen av vind och vågor blir fartförlusten för ett fartyg i barlast mycket större än för ett fartyg i full last.
Trimningen har en betydande effekt på hastighetsändringen. Som regel minskar trimmen på nosen hastigheten. En betydande trimning av aktern leder till samma resultat. Det optimala trimningsalternativet väljs baserat på experimentella data.
Närvaron av fartygets rullning orsakar dess systematiska avvikelse från den givna kursen mot den upphöjda sidan, vilket är en konsekvens av kränkningen av symmetrin hos konturerna av den del av skrovet som är nedsänkt i vatten. Av denna anledning är det nödvändigt att tillgripa oftare att flytta rodret för att hålla fartyget på kurs, vilket i sin tur leder till en minskning av fartygets hastighet.
2. Vind och vågor verkar vanligtvis på fartyget samtidigt och orsakar i regel fartförluster. Motvind och vågor skapar betydande motstånd mot fartygets rörelse och försämrar dess kontrollerbarhet. Hastighetsförluster i detta fall kan vara betydande.
Vindar och vågor i samma riktning minskar fartygets hastighet främst på grund av en kraftig försämring av dess kontrollerbarhet. Endast med svag medvind och svaga vågor visar vissa fartygstyper en liten fartökning.
3. Nedsmutsning av skrovet observeras när fartyg navigerar under alla förhållanden, både i söt- och saltvatten. Nedsmutsning sker mest intensivt i varma hav. Konsekvensen av nedsmutsning är en ökning av vattenmotståndet mot fartygets rörelse, d.v.s. hastighetsminskning. På medelbreddgrader, efter sex månader, kan hastighetsminskningen nå 5 - 10%. Kampen mot nedsmutsning utförs genom systematisk rengöring av fartygets skrov och målning av det med speciella
växande färger.
4. Grunt vatten. Effekten av grunt vatten på fartygets hastighetsminskning
börjar påverka på djup i navigeringsområdet
H≤4Tcp + 3V 2 /g,
var H - djup, m
Tcp, - fartygets genomsnittliga djupgående, m;
V- Fartygets hastighet, m/s;
g- tyngdacceleration, m/s 2 .
Således kommer beroendet av fartygets hastighet på propellrarnas rotationshastighet, bestämd för specifika seglingsförhållanden, att kränkas under påverkan av dessa faktorer. I det här fallet kommer beräkningarna av fartygets tillryggalagda sträcka, utförda med formel (38), att innehålla betydande fel.
I praktiken av navigering beräknas ibland ett fartygs hastighet med hjälp av det kända förhållandet
V=S/ t,
var V- Fartygets hastighet i förhållande till marken, knop;
S - tillryggalagd sträcka med konstant hastighet, miles; t - tid, h.
Redovisning av hastigheten och avståndet som fartyget färdas utförs mest exakt med hjälp av en speciell anordning - en logg.
För att bestämma fartygets hastighet är mätlinor utrustade, vars lokaliseringsområde är föremål för följande krav:
bristande påverkan av grunt vatten, vilket säkerställs på ett minsta djup som bestäms av förhållandet
N/T≥ 6,
var H- djup av mätlinjeområdet, m; T- fartygets djupgående, m;
skydd mot rådande vindar och vågor;
frånvaron av strömmar eller närvaron av svaga konstanta strömmar som sammanfaller med körningarnas riktningar;
möjligheten till fri manöver av fartyg.
Ris. 23. Mätlina
Mätlinjens utrustning (fig. 23) består som regel av flera parallella sekantsektioner och en som leder en vinkelrätt mot dem. Avstånd mellan sekantlinjer beräknas med hög noggrannhet. I de flesta fall indikeras fartygens löplinje inte av den ledande linjen, utan av bojar eller milstolpar längs den.
Typiskt görs mätningar vid full belastning och i ballast för huvudmotorns driftlägen. Under mätperioden på den uppmätta linjen bör vinden inte överstiga 3 poäng och spänningen - 2 poäng. Fartyget bör inte ha en krängning, och trimningen bör ligga inom de optimala gränserna.
För att bestämma hastigheten måste fartyget ligga på en kompasskurs vinkelrätt mot linjerna för sekantlinjerna och utveckla en given rotationsfrekvens för propellrarna. Mätningen av löptidens längd görs vanligtvis enligt avläsningarna från tre stoppur. I det ögonblick de korsar det första sekantmålet startas stoppur och varje minut märker de varvräknarnas avläsningar. Stoppur stannar vid skärningspunkten mellan det andra sekantmålet.
Efter att ha beräknat den genomsnittliga körtiden enligt indikationerna på stoppur, bestäms hastigheten av formeln
V = 3600S/t, (39)
där S är längden på löpningen mellan sekantlinjerna, miles;
t- den genomsnittliga varaktigheten av körningen mellan sekantlinjerna, s; V- Fartygets hastighet i förhållande till marken, knop.
Propellrarnas rotationshastighet bestäms som det aritmetiska medelvärdet av varvräknaravläsningarna under körningen.
Om det inte finns någon ström i området för mätlinjen, är hastigheterna i förhållande till marken och vattnet lika. I det här fallet räcker det att bara köra en gång. Om det finns en strömkonstant i riktning och hastighet i manöverområdet är det nödvändigt att göra två körningar i motsatta riktningar. Fartygets V 0 relativa hastighet och propellrarnas rotationsfrekvens P i detta fall kommer att bestämmas av formlerna:
Vo \u003d (V 1 + V 2) / 2, (40)
n=(n 1 + n 2)/2, (41)

Ris. 24. Graf över hastighetens beroende av propellrarnas rotationsfrekvens
där V 1 , V 2 - fartygets hastighet i förhållande till botten på den första och andra körningen; n 1 och n 2
- rotationsfrekvens för propellrar vid första och andra körningen.
När en jämnt föränderlig ström verkar i området för den uppmätta linjen, rekommenderas att göra en tredje körning i samma riktning som den första, och hastigheten fri från strömmens inverkan beräknas nhandla om ungefärlig formel
V 0 \u003d (V 1 + 2V 2 + V 3) / 4. (42)
Om arten av förändringen i strömmen är okänd eller de vill få ett mer exakt resultat, görs fyra körningar och hastigheten beräknas med formeln
V 0 \u003d (V 1 + 3V 2 + 3V 3 + V 4) / 8. (43)
Medelhastigheten för framdrivarna i dessa fall beräknas för tre respektive fyra körningar:
n \u003d (n 1 + 2n 2 + n 3) / 4; (44)
n = (n 1 + 3n 2 + 3n 3 + n 4)/8. (45)
Således bestäms hastigheten och rotationshastigheten för propellrarna för flera driftsätt för huvudmotorerna i last och i ballast. Baserat på erhållna data byggs grafer över hastighetens beroende av propellrarnas rotationshastighet för olika lastning av fartyget (fig. 24).
Baserat på dessa grafer sammanställs en tabell över överensstämmelse mellan propellrarnas hastighet och propellrarnas rotationsfrekvens eller en tabell över överensstämmelsen mellan propellrarnas rotationshastighet och fartygets hastighet.
Om någon hastighet och motsvarande rotationshastighet för propellrarna är kända från resultaten av att passera mätlinjen, är det möjligt att beräkna hastighetsvärdet för vilket mellanvärde som helst av propellrarnas rotationshastighet med hjälp av Afanasiev-formeln
V Och \u003d V 0 (n 1 / n 0) 0, 9, (46)
där V0 - känd hastighet vid propellerns rotationsfrekvens n 0 ; V Och, - den önskade hastigheten för framdrivningshastigheten n 1 .
Efter att ha bestämt ditt fartygs hastighet enligt grafen för dess beroende av propellrarnas rotationshastighet, kan du beräkna den tillryggalagda sträckan i nautiska mil med formeln
där V 0 - fartygets hastighet, knop; t- seglingstid, min.
Om den tillryggalagda sträckan är känd, utförs beräkningen av seglingstiden: v
Enligt dessa formler sammanställdes tabellerna "Avstånd efter tid och hastighet" och "Tid efter sträcka och hastighet" i MT - 75 bilagor 2 respektive 3.
Beräkningar av tillryggalagd sträcka med den hastighet som bestäms av rotationsfrekvensen för propellrarna V o6 utförs endast i frånvaro av en fördröjning eller för att kontrollera dess funktion.
Bestämning av fartygets hastighet genom propellerhastighetsläget.
Loggar används för att mäta hastigheten på stora fartyg. På små fartyg ger en enkel logg stora fel vid bestämning av hastigheten och det är inte alltid möjligt att tillämpa den. För små båtar är det därför lättare att bestämma hastigheten från tabeller eller grafer som uttrycker hastighetens beroende av antalet propellervarv. För att ha sådana tabeller eller grafer är det nödvändigt att bestämma fartygets hastighet på den uppmätta linjen för olika propellervarv (fig. 59). Hastighetsbestämningen utförs vid gynnsamt väder. Fartygets giring på kursen får inte överstiga ±2°.
Ris. 59. Schema för mätlinjeutrustning
Mätlinan är försedd med en främre lina, längs vilken fartyget håller sin kurs, och fyra eller flera sekantlinjer, vars avstånd är noggrant uppmätta. Fartygshastigheten på den uppmätta linjen mäts vid konstant motordrift. För att eliminera fel vid bestämning av hastigheten från påverkan av vind och ström, görs två körningar i samma läge för motordrift - i en riktning och den andra.
Vid stoppuret märker de det ögonblick då fartyget passerar sekantlinjerna. Genom att känna till tiden t 1, t 2, t 3 och avståndet mellan sekantsektionerna S 1, S 2, S 3, beräknas hastigheten V S med formeln:
V S = S
där: V S - fartygets hastighet i knop;
S - avstånd mellan sekantlinjer i miles;
t är tiden för passage från målet till målet, sek.
Under varje körning är det viktigt att noggrant bibehålla det specificerade motorvarvtalet. Beräkna de individuella hastigheterna V 1 , V 2 , V 3 , hitta medelvärdet.
Efter att ha bestämt hastigheten på den uppmätta linjen byggs en tabell eller graf över fartygets hastighets beroende av antalet motorvarv (fig. 60).
Det är användbart att bestämma fartygets hastighet vid olika djupgående. Sedan blir det flera grafer och tabeller. De kan avbildas på ett pappersark för enkel användning. Med sådana tabeller eller grafer på fartyget är det möjligt att hitta lämplig hastighet för fartyget från ett givet motorvarvtal och ett känt djupgående.
Ibland finns det ingen utrustad mätlina i närheten. Men för att bestämma fartygets hastighet är det alltid möjligt att välja två kustlandmärken, vars avstånd är ganska exakt känt. Dessa avstånd kan bestämmas till exempel från en plan som innehåller båda landmärkena.
De ledande inriktningarna kan ersättas av en kompass på fartyget, om det inte finns någon rädsla för att fartyget kommer att blåsas ur kurs av vind eller ström, för detta är det nödvändigt att kontrollera och eliminera påverkan av en körande motor på kompassen.
För att mäta hastighet måste fartyget vara på rak kurs på en säker navigeringsväg.

Puc. 60. Fartygshastighet kontra motorhastighet graf
Riktningen på linjen som förenar objekten kan bestämmas med hjälp av en kompass, men det är nödvändigt att körningar görs i en riktning parallell med linjen som förbinder objekten.
Innan fartyget närmar sig den första referenspunkten utvecklar fartyget en viss hastighet och går in i den uppmätta kursen med ett givet motorvarvtal, som förblir konstant under körningen till den andra referenspunkten. När det första landmärket är upplyst, startas ett stoppur eller tiden noteras av klockan. Nedräkningen görs i det ögonblick som fartyget passerar traversen av det andra landmärket. Samma observationer görs under den omvända körningen.
§ 27. Förenklad metod för att bestämma fartygets hastighet.
Om det är omöjligt, särskilt under navigering, att bestämma fartygets hastighet med någon av metoderna som beskrivs ovan, används en annan, om än mindre exakt, metod. Det är nödvändigt att kasta ett tillfälligt landmärke i vattnet från fartygets för - en liten träbit - och samtidigt slå på stoppuret. När en träbit når akterns snitt stoppas stoppuret. Baserat på den uppmätta tiden och fartygets kända längd, hittas hastigheten med formeln:
V S = ,
där V S - fartygets hastighet i knop;
L är kärlets längd, m;
t- tid för passage av ett föremål som kastas i vattnet, sek.
Man bör komma ihåg att ju kortare kärlet är, desto större blir felet.
När man bestämmer det tillryggalagda avståndet måste man komma ihåg att fartygets rörelse endast sker i förhållande till vattnet och inte till marken. Vind och ström beaktas inte, även om de hela tiden påverkar fartygets hastighet. Därför, när man styr läggningen i avståndet beräknat av hastighet, är det nödvändigt att införa en ändring på grund av drift av ström och vind. Det enklaste sättet att göra detta är när fartygets kurs sammanfaller med ström- och vindriktningen eller är motsatt dem. Med sidodrifter kommer ökningen eller minskningen av hastigheten att vara ungefär proportionell mot cosinus för vinkeln mellan fartygets kurs och ström- eller vindens verkningslinjer.
De främsta orsakerna till minskningen av fartygets hastighet:
1) grunt vatten, i vilket vattenmotståndet kraftigt ökar när hastigheten ökar. Därför kan hastigheten minska med 10 - 15% på grunt vatten;
2) vind och pitching. Med motvind och vågor, samt med stark medvind åtföljd av vågor, minskar hastigheten.
Vid svag medvind ökar farten något. Hastighetsminskning observeras när fartyget överlastas, rullas och trimmas till fören. På en våg, i de ögonblick då propellern lämnar vattnet, tappar fartyget abrupt fart;
3) nedsmutsning av undervattensdelen av fartygets skrov leder till en minskning av farten med 10 - 15 % jämfört med hastigheten för ett fartyg med rent skrov.
"Bestämma fartygets hastighet och avståndet till havs"
Avståndet till sjöss mäts i nautiska mil och kabelmil, så avståndet som fartyget tillryggalagt mäts i samma enheter. 1 mil = 10 kb.
Farten på ett fartyg uttrycks i miles per timme, eller knop.
En knop är en enhet för fartygshastighet lika med en mil per timme. 1 knop = 1 mil/timme.
Instrument som mäter ett fartygs hastighet och bestämmer tillryggalagd sträcka kallas släpar.
Loggar, beroende på funktionsprincipen och enheten, är indelade i
Relativ (hydrodynamisk, induktion), mäter fartygets hastighet i förhållande till vattnet
Absolut (Dopplerloggar, tröghets- och geoelektromagnetiska system), som mäter fartygets hastighet i förhållande till marken.
1. Hydrodynamisk. Driften av dessa stockar är baserad på att mäta skillnaden mellan statiskt och dynamiskt vattentryck, vilket beror på fartygets hastighet.
2. Induktion. Funktionsprincipen är baserad på användningen av förhållandet mellan fartygets hastighet och EMF som induceras i vattnet av en magnetfältskälla fixerad på fartygets botten.
3. Doppler. Funktionsprincipen är baserad på användningen av dopplereffekten, som består i att ändra den observerade frekvensen på grund av den relativa rörelsen hos den emitterade energikällan
Fartygets rörelse brukar också delas in i relativ hastighet V o (V l), absolut hastighet V (V a, V u) och bärbar V c under inverkan av vind, ström eller deras kombinerade effekt.
På fartyg används främst relativa stockar som mäter hastighet och tillryggalagd sträcka i förhållande till vattnet med hänsyn till vinden, men utan hänsyn till strömmen. Som regel har laggar ett fel som kallas lagkorrigering.
Lagkorrigering kallas det systematiska felet, uttryckt i procent.
S-ROL
ΔL= ----------- 100%
var S– faktisk (sanna) avstånd taget från kartan;
ROL- skillnaden mellan avläsningarna av fördröjningen. ROL=OL 2 - OL 1.
Ofta uttrycks eftersläpningskorrigeringen i termer av eftersläpningskoefficienten k l.
Fördröjningskorrigeringen och fartygets hastighet bestäms efter konstruktion eller reparation på speciella träningsplatser - mätlinjer under följande förhållanden: vågor högst 3 punkter, vind upp till 8 m/s, djup inte mindre än 6 medeldjupgående.
Fördröjningskorrigeringen och fartygets hastighet bestäms på FPH, SPH, MPH, SMPH i last och i barlast.
De erhållna resultaten förs in i tabellen över manövrerbara element.
I frånvaro av flöde på den uppmätta linjen görs 1 körning.
I närvaro av ett konstant flöde görs 2 körningar för att utesluta det, eftersom på ömsesidigt omvända kurser från formel (1) på den första körningen, antag att V 0 = V 1 - V T , sedan på den andra körningen V 0 = V 2 - V T . Den gemensamma lösningen av dessa två ekvationer gör det möjligt att eliminera strömmen och bestämma fartygets hastighet i förhållande till vattnet.
Följaktligen kommer eftersläpningskorrigeringen också att bestämmas: de beräknas med formel (2) för två körningar.
Om en propeller med fast stigning är installerad på fartyget, märks propellerhastigheten N under körningarna och beroendet av fartygets hastighet V varv. Sedan kan den tillryggalagda sträckan bestämmas med formeln: , där a- förskott, d.v.s. avståndet som fartyget tillryggalagt i förhållande till vattnet i ett varv av propellern. Beräknat från V omkring och motsvarande rotationsfrekvens för propellrarna N: . .
I havet hastighets- och eftersläpningskorrigeringen bestäms av en fritt flytande referenspunkt (för att utesluta strömmen) med hjälp av radar eller högprecisionsobservationer (med satelliter) med uteslutning av strömmen grafiskt eller genom formler. För att eliminera ackumulerande fel bör längden på en körning vara med en hastighet av 10 knop. - 2,3 NM; 15 knop – 3,6 NM; 18 knop - 4,3 mm eller; 20 knop - 4,9 NM (N. V. Averbakh, Yu. K. Baranov Bestämning av manövreringselementen för ett sjöfartyg och lagkorrigeringar). Sedan
Uppgifter lösta i redovisningen.
Förberäkning av fördröjningsräkning: OL i +1 =ROL+ OL i, där ROL=Sl/kl.
Beräkning av avståndet tillryggalagt längs loggen: S l \u003d V l DT.
Beräkning av seglingstid: T= S l / V l; DT= S u/Vu;